無通信タイムアウト時間
セッションが確立され、ファイル転送や要求受付処理をしている場合、ネットワークの障害などによりパケットがロストすることがあります。
TCP/IPがそれを感知しない限り、HULFTもそれを検知できず待ち状態となります。この待ち時間の制限として無通信タイムアウトを設定します。
無通信タイムアウトを短く設定することで、迅速にネットワーク異常を検知することができます。
無通信タイムアウトは、処理の違いにより、タイムアウトを検知する値が異なる場合があります。大きく分けて以下の3パターンがあります。
-
配信処理または集信処理
-
要求受付処理
-
同期指定時の送信要求、リモートジョブ実行、およびファイルトリガ情報制御実行
配信処理または集信処理
配信処理中または集信処理中は、それぞれ自ホストに設定されている無通信タイムアウトを採用し、ネットワーク異常を検知します。

図4.10 無通信タイムアウト(配信処理または集信処理)
転送の前後で時間のかかる処理がある場合、正常処理中の通信タイムアウトを防止するため、HULFTは少量のパケットを一定間隔で送受信します。ネットワーク障害時には、そのパケットの応答待ち時間として無通信タイムアウトを採用し、異常を検知します。
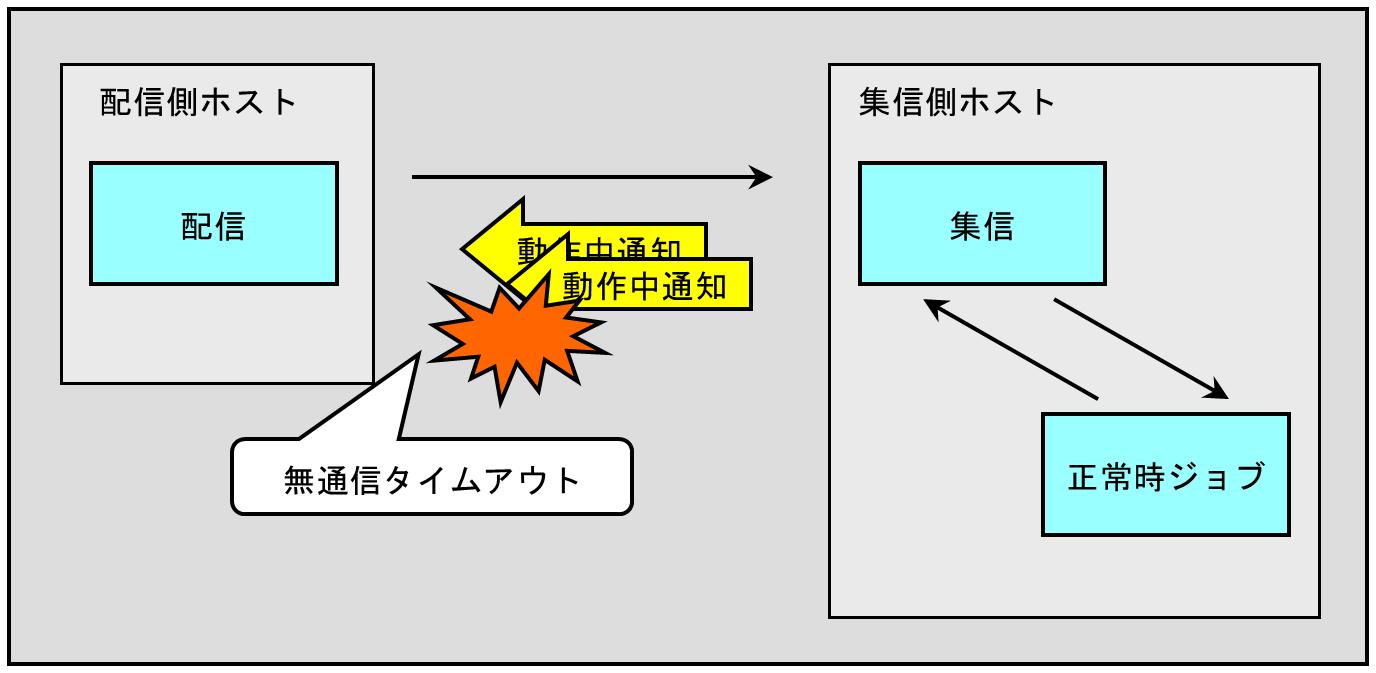
図4.11 無通信タイムアウト(例:「集信完了通知」“正常時ジョブ完了”の正常時ジョブ実行中)
指定方法
HULFT for zOS
- 配信
-
配信常駐プログラム(XRSND)の起動JCL、XRSYSIN定義カード
-
TIMEOUT=ソケットリード待ち時間(秒)
-
- 集信
-
集信常駐プログラム(XRRCV)の起動JCL、XRSYSIN定義カード
-
RCV-TIMEOUT=集信ソケットリード待ち時間(秒)
-
HULFT for IBMi
システム動作環境設定
-
ソケットリードタイムアウト(タグ名:SOCKTIME)
HULFT for Linux/AIX
システム動作環境設定
-
ソケット通信応答待ち時間(タグ名:socktime)
HULFT for Windows
システム動作環境設定
-
ソケットリードタイムアウト(タグ名:socktime)
要求受付処理
要求受付(サーバープログラム)は、要求発行コマンドやHULFT Managerからの応答待ち時間として、無通信タイムアウトを設定します。
また、要求発行(クライアントプログラム)は、要求受付からの応答待ち時間として、無通信タイムアウトを設定します。
ネットワーク障害時には、それぞれの時間で異常を検知します。HULFT Managerにおいては設定された無通信タイムアウト時間以上、別画面参照などの操作が行われなかった場合、無通信タイムアウトが発生します。
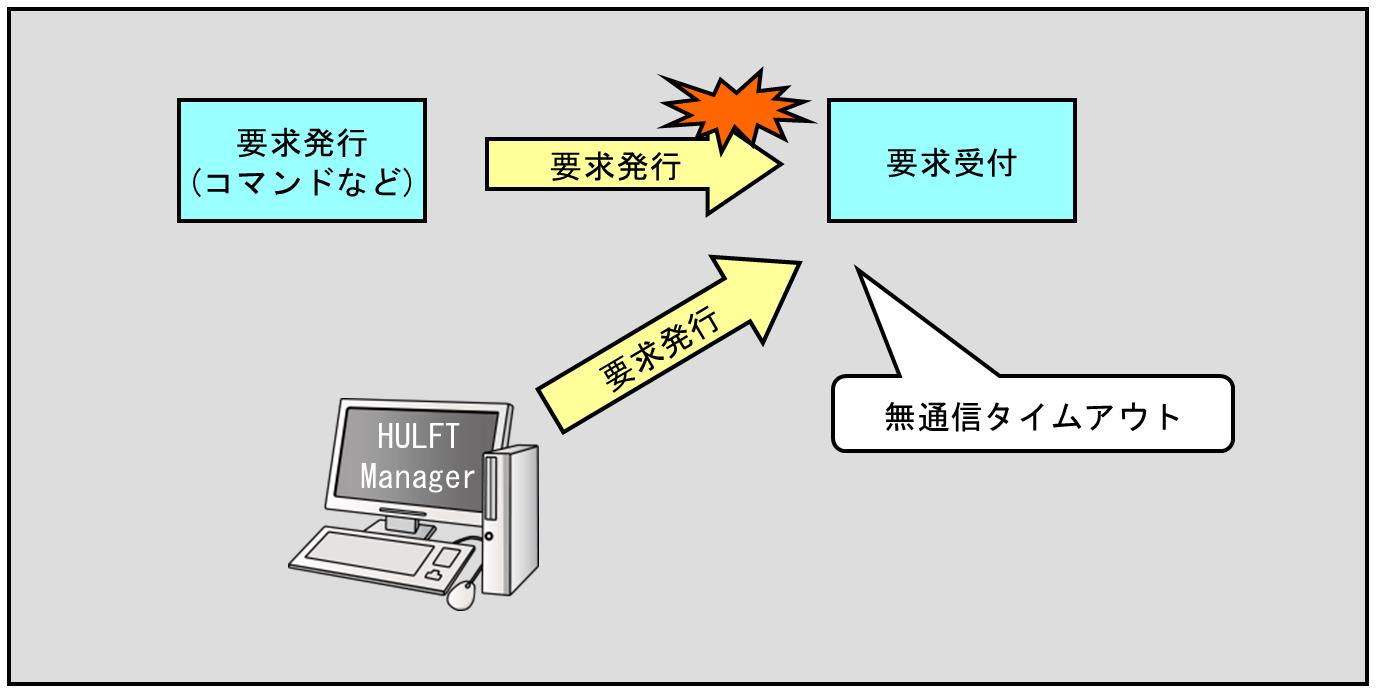
図4.12 無通信タイムアウト(要求受付処理)
要求発行(クライアントプログラム)とは、以下の接続要求です。
-
送信要求
-
再送要求
-
ジョブ実行結果通知
-
集信後ジョブ結果参照要求
-
リモートジョブ実行
-
HULFT Managerからの接続要求
-
DataMagic Managerからの接続要求
(DataMagic for UNIX/Linux導入時のみ)
-
ファイルトリガ情報制御
要求発行プログラムで、HULFT Managerが使用する無通信タイムアウトの値は、それぞれのマニュアルを参照してください。
ファイルトリガ情報制御は、以下のいずれかを導入している場合に使用できます。
-
HULFT10のServerグレード
-
HULFT10のEnterpriseグレード
指定方法
HULFT for zOS
- 要求受付
-
以下の順に有効になります。
-
要求受付常駐プログラム(XRACCPT)の起動JCLの実行(EXECステートメント)パラメータ(非推奨)
-
ソケットリード待ち時間(パラメータ名:TIMEOUT)
-
-
システム動作環境設定
-
要求受付ソケットリード待ち時間(タグ名:APT-TIMEOUT)
-
-
システム動作環境設定
-
ソケットリード待ち時間(タグ名:TIMEOUT)
-
-
- 要求発行プログラム
-
システム動作環境設定
-
ソケットリード待ち時間(タグ名:TIMEOUT)
-
HULFT for IBMi
- 要求受付 (HULFT Manager以外)
-
システム動作環境設定
-
ソケットリードタイムアウト(タグ名:SOCKTIME)
-
- 要求受付 (HULFT Manager)
-
システム動作環境設定
-
HULFT MANAGERタイムアウト(タグ名:ADMSOCKTIME)
-
- 要求発行プログラム
-
システム動作環境設定
-
ソケットリードタイムアウト(タグ名:SOCKTIME)
-
HULFT for Linux/AIX
- 要求受付
-
システム動作環境設定
-
要求受付応答待ち時間(タグ名:obssocktime)
-
- 要求発行プログラム
-
システム動作環境設定
-
ソケット通信応答待ち時間(タグ名:socktime)
-
HULFT for Windows
- 要求受付 (送信要求、再送要求、ジョブ実行結果通知要求、リモートジョブ実行要求 接続時)
-
システム動作環境設定
-
ソケットリードタイムアウト(タグ名:socktime)
-
- 要求受付 (HULFT Manager、集信後ジョブ結果参照要求 接続時)
-
システム動作環境設定
-
HULFT Managerタイムアウト(タグ名:admsocktime)
-
- 要求発行プログラム
-
システム動作環境設定
-
ソケットリードタイムアウト(タグ名:socktime)
-
同期指定時の送信要求、リモートジョブ実行、およびファイルトリガ情報制御実行
HULFT Ver.6.3以降の送信要求、リモートジョブ実行、およびHULFT Ver.7.2で追加されたファイルトリガ情報制御実行の同期モード指定時には、転送処理中やジョブ実行、ファイルトリガ情報読み込み中の通信タイムアウトを防止するため、HULFTは少量のパケットを一定間隔で送受信します。ネットワーク障害時には、そのパケットの応答待ち時間として無通信タイムアウトを採用し、異常を検知します。
ファイルトリガ情報制御はHULFT10のServerグレードまたはEnterpriseグレードを導入している場合に使用できます。
図4.13 無通信タイムアウト(例:同期指定時の送信要求)
以下の場合、無通信タイムアウト防止のパケット送受信は行っていません。
-
要求発行または受付側のHULFTのどちらかがVer.6.3未満の場合
-
送信要求またはファイルトリガ情報制御で、コマンドのパラメーターで待ち時間指定なしの場合
そのため無通信タイムアウトを短く設定した場合、機種によっては、処理結果を受け取るための時間(同期転送待ち時間、同期指定時のリモートジョブ待ち時間)を考慮した通信タイムアウト時間(下位バージョン互換の無通信タイムアウト)を採用しています。
同期転送待ち時間については「同期転送指定時の待ち時間」を参照してください。
リモートジョブ待ち時間については「同期指定時のリモートジョブ待ち時間」を参照してください。
ファイルトリガー制御の待ち時間については「同期指定時のファイルトリガ情報制御待ち時間」を参照してください。
指定方法
HULFT for zOS
- 送信要求
-
送信要求プログラム(XRRCVREQ)の起動JCL、XRSYSIN定義カード
-
TIMEOUT=ソケットリード待ち時間(秒)
-
- リモートジョブ実行
-
リモートジョブ実行プログラム(XRRJOBEX)の起動JCL、XRSYSIN定義カード
-
TIMEOUT=ソケットリード待ち時間(秒)
-
HULFT for IBMi
- 送信要求コマンド(UTLRECV)
-
システム動作環境設定
-
ソケットリードタイムアウト(タグ名:SOCKTIME)
= 備考 =下位バージョン互換の無通信タイムアウトは、以下のうちいずれか大きい方の値となります。
-
システム動作環境設定のソケットリードタイムアウトの設定値(秒)
-
パラメーター「同期転送待ち時間」の設定値+ 60(秒)
注意以下の場合は、下位バージョン互換の無通信タイムアウトが採用されます。
-
コマンドのパラメーターで同期転送待ち時間の指定がない
-
システム動作環境設定のパケット送信が“パケットを送信しない”に設定されている
-
- リモートジョブ実行コマンド(UTLRJOB)
-
システム動作環境設定
-
ソケットリードタイムアウト(タグ名:SOCKTIME)
= 備考 =下位バージョン互換の無通信タイムアウトは、以下のうちいずれか大きい方の値となります。
-
システム動作環境設定のソケットリードタイムアウトの設定値(秒)
-
パラメーター「同期実行待ち時間」の設定値+ 60(秒)
-
HULFT for Linux/AIX
- 送信要求コマンド(utlrecv)
-
システム動作環境設定
-
ソケット通信応答待ち時間(タグ名:socktime)
= 備考 =下位バージョン互換の無通信タイムアウトは、以下のうちいずれか大きい方の値となります。
-
システム動作環境設定のソケット通信応答待ち時間の設定値(秒)
-
パラメーター「同期転送待ち時間」の設定値+ 60(秒)
注意コマンドのパラメーターで同期転送待ち時間の指定がない場合は、下位バージョン互換の無通信タイムアウトが採用されます。
-
- リモートジョブ実行コマンド(utlrjob)
-
システム動作環境設定
-
ソケット通信応答待ち時間(タグ名:socktime)
= 備考 =下位バージョン互換の無通信タイムアウトは、以下のうちいずれか大きい方の値となります。
-
システム動作環境設定のソケット通信応答待ち時間の設定値(秒)
-
パラメーター「同期実行待ち時間」の設定値+ 60(秒)
-
- ファイルトリガ情報制御コマンド (utltriggerconf)
-
システム動作環境設定
-
ソケット通信応答待ち時間(タグ名:socktime)
注意ファイルトリガー機能はHULFT10のEnterpriseグレードを導入している場合に使用できる機能です。
-
HULFT for Windows
- 送信要求コマンド(utlrecv)
-
システム動作環境設定
-
ソケットリードタイムアウト(タグ名:socktime)
= 備考 =下位バージョン互換の無通信タイムアウトは、以下のうちいずれか大きい方の値となります。
-
システム動作環境設定のソケットリードタイムアウトの設定値(秒)
-
パラメーター「同期転送待ち時間」の設定値+ 60(秒)
注意コマンドのパラメーターで同期転送待ち時間の指定がない場合は、下位バージョン互換の無通信タイムアウトが採用されます。
-
- リモートジョブ実行コマンド(utlrjob)
-
システム動作環境設定
-
ソケットリードタイムアウト(タグ名:socktime)
= 備考 =下位バージョン互換の無通信タイムアウトは、以下のうちいずれか大きい方の値となります。
-
システム動作環境設定のソケットリードタイムアウトの設定値(秒)
-
パラメーター「同期実行待ち時間」の設定値+ 60(秒)
-
- ファイルトリガ情報制御コマンド(utltriggerconf)
-
システム動作環境設定
-
ソケットリードタイムアウト(タグ名:socktime)
注意ファイルトリガー機能はHULFT10のServerグレードを導入している場合に使用できる機能です。
-